ნაწილი საფონდო: 125
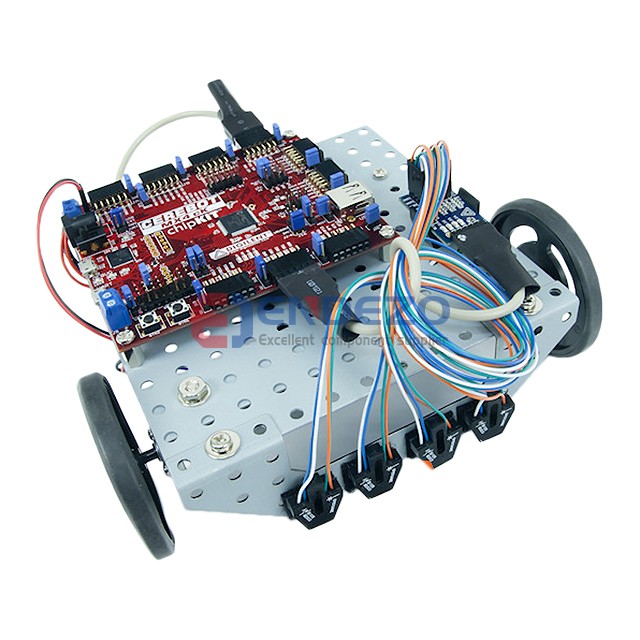
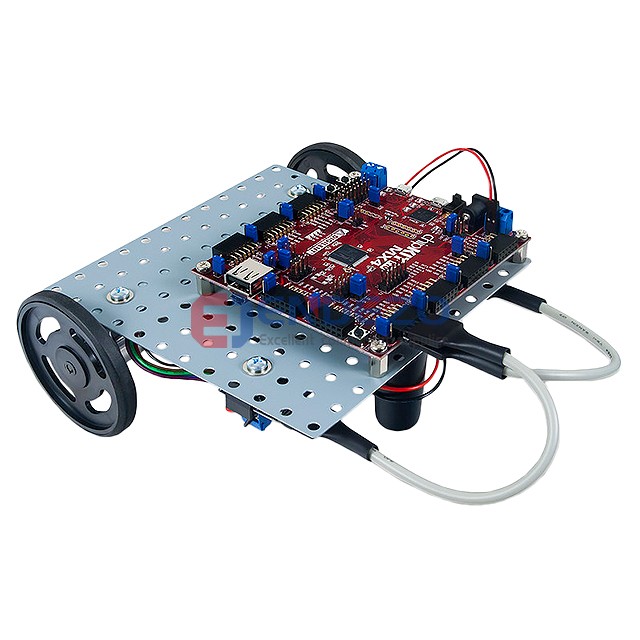
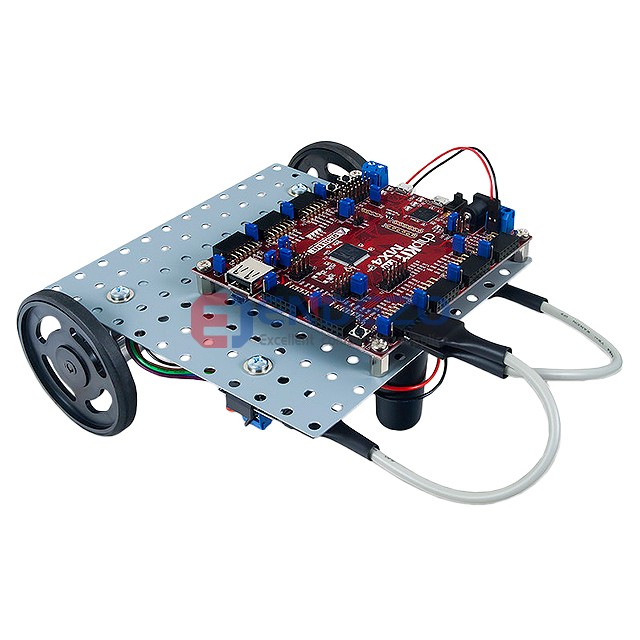
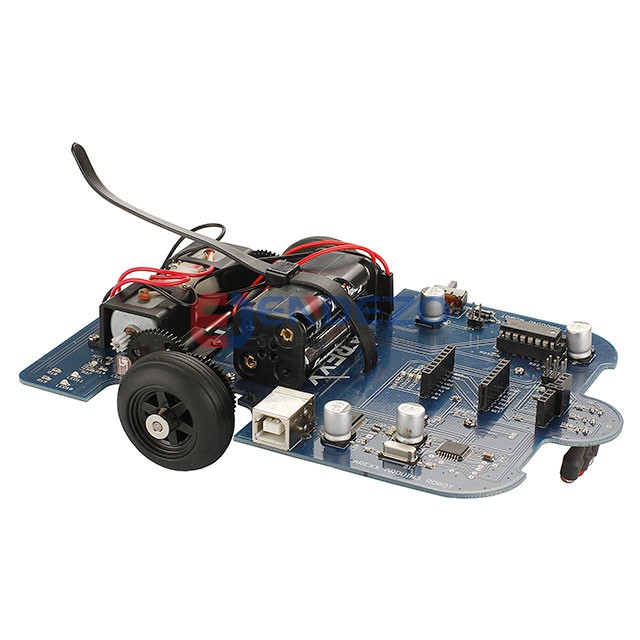
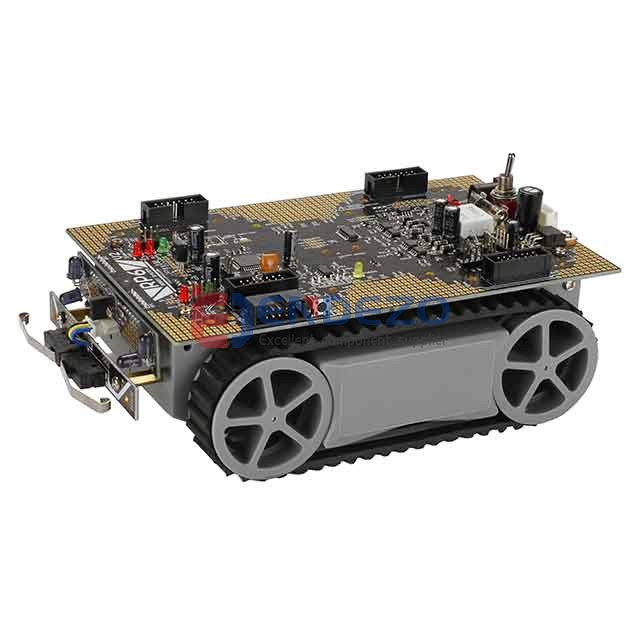
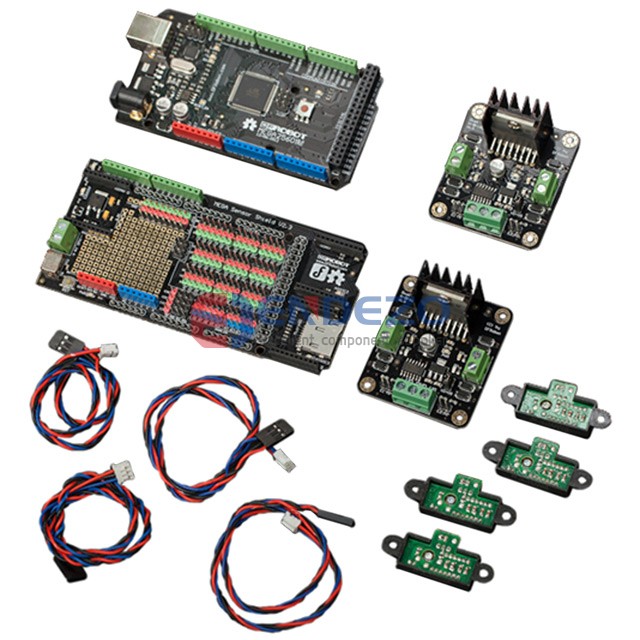
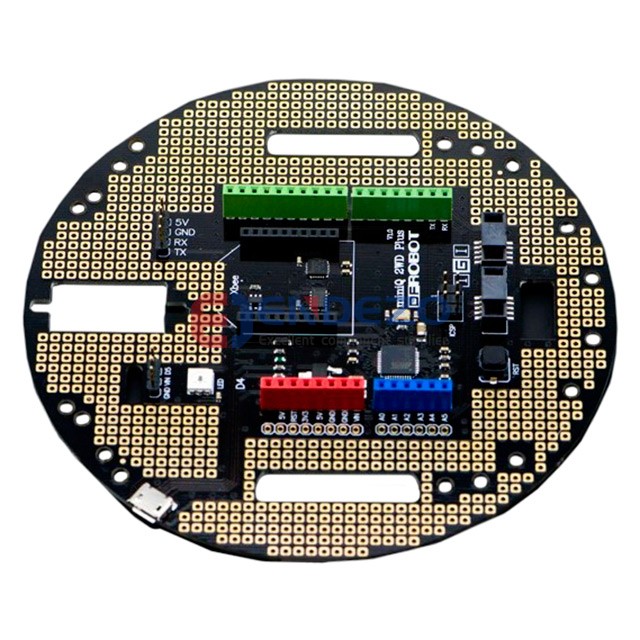
კონფიგურაცია: Wheeled, გამოყენებული IC / ნაწილი: ATmega32U4, URM37, ურთიერთკავშირის სისტემა: Arduino R3 Shield, Gravity, Xbee, შემოთავაზებული პროგრამირების გარემო: Arduino IDE, მოყვება MCU / MPU საბჭო (ებ) ი: DFRobot Romeo V2, შინაარსი: Board(s), Cable(s), Chassis, Components, Hardware, Sensor(s), Servo(s), Wheel(s),